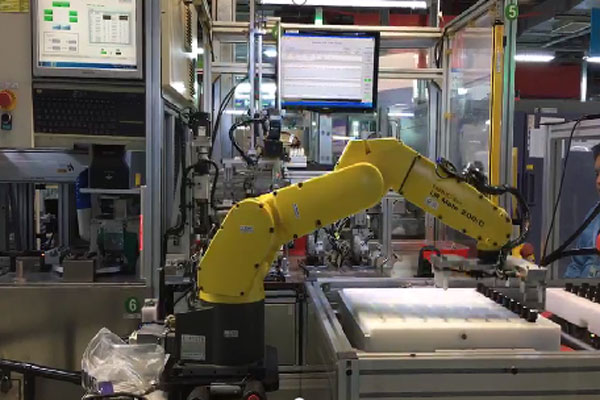
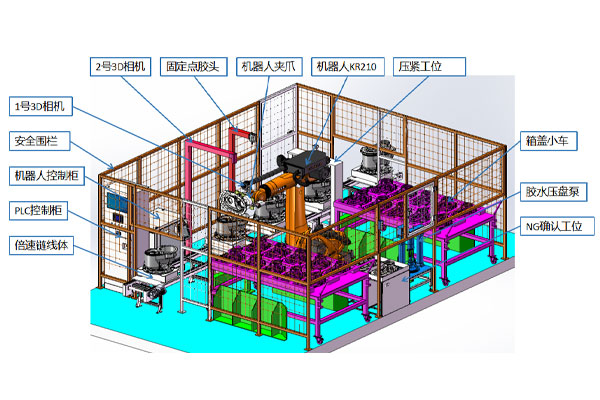
利用机器人在AGV小车运送过来的减速机箱体上自动涂密封胶。
a. AGV小车带着产品到达点胶位置后停止;
b. 机器人带距离传感器在产品的点胶平面上打3个点,以确定产品点胶平面是否水平或者计算出倾斜角度反馈给机器人以调整姿态;
c. 机器人带相机进行拍照以确认点胶起始点位置;
d. 机器人点胶,其中图形可调;
e. 点胶结束,相机拍照检测点胶是否达标。如果达标则流入下一站,否则通知设备人员确认。