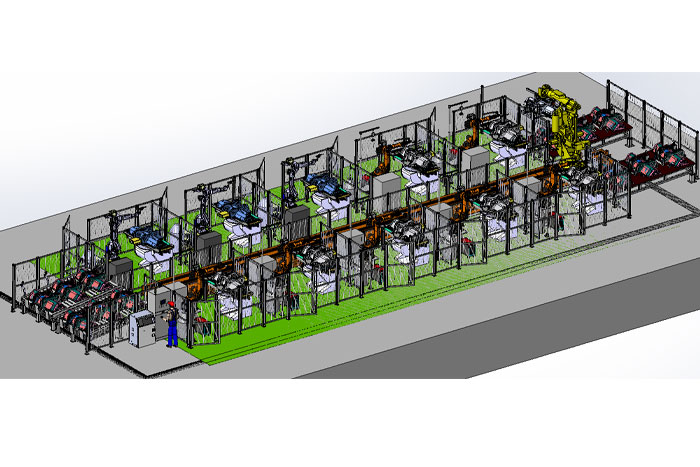
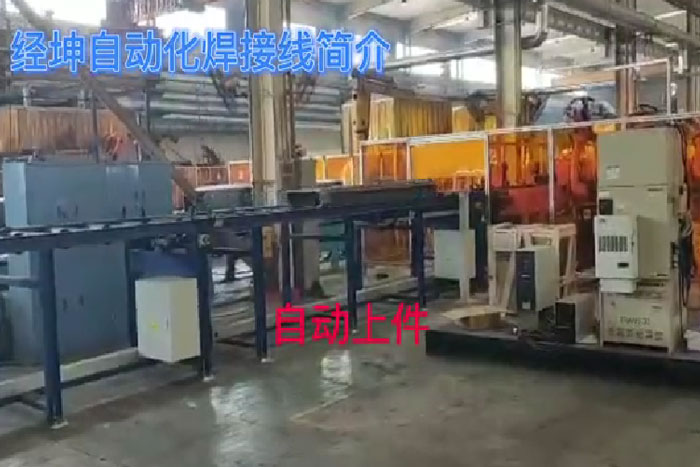
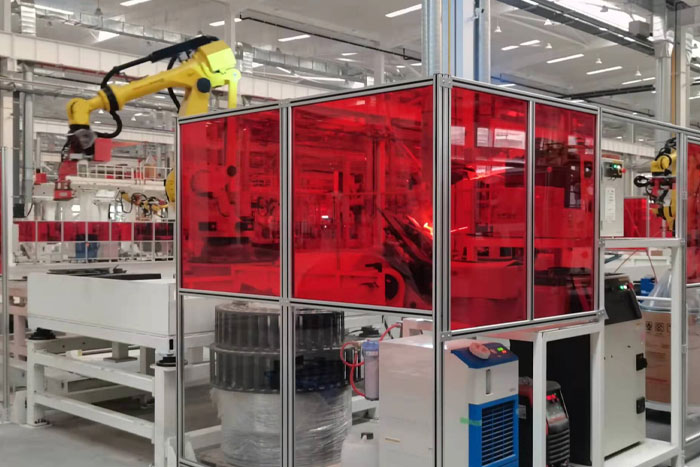
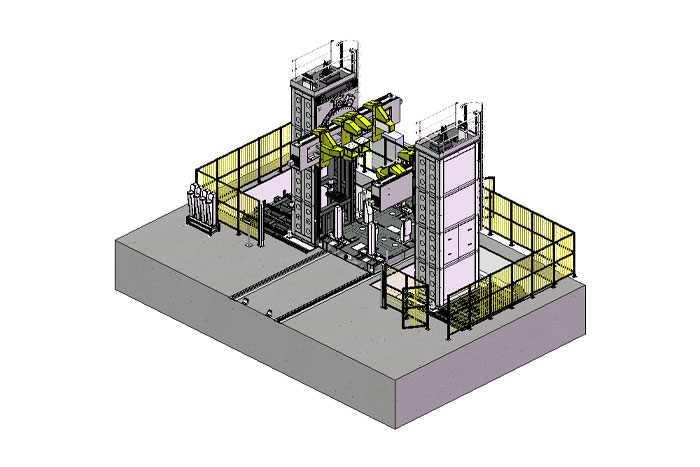
人工打底完成后使用 KBK 放置在上料台上→上料台通过传感器识别机型→PLC 控制搬运机器人抓取工件并放置至空闲焊接机器人工位→自动装夹、焊接→焊接完成搬运机械手下件至下料台缓存整个生产过程可实现来料自动定位、物料种类识别、零件自动上下料、自动焊接及转运等。项目于2023年6月12日验收。